Cartesian
class Cartesian
Rotational utilities for Pose2d and Vector2d, including conversion from Cartesian to Robot space.
The Cartesian Coordinate System is a 2D coordinate system where the x-axis goes to the right (pos X) and the y-axis goes up/forward (pos Y). Angles on the Cartesian Coordinate System are measured clockwise from the positive y-axis.
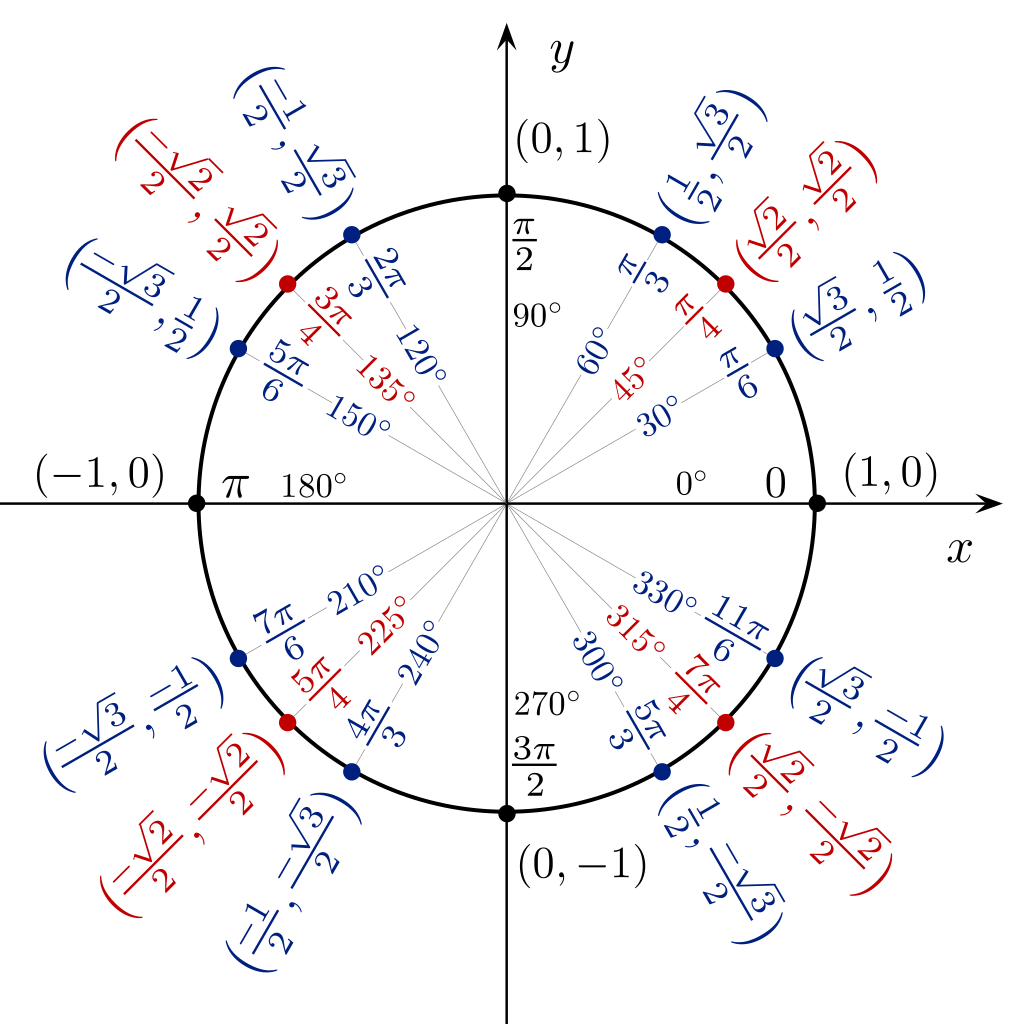
The Robot Coordinate System is a 2D coordinate system where the x-axis goes up/forward (pos X) and the y-axis goes left (pos Y), and the angles are measured anti-clockwise from the positive x-axis. This is the coordinate system used by the RoadRunner library, and perfectly models a Unit Circle.
{kind=link}
Author
Lucas Bubner, 2023
Since
1.0.0-pre